Projects

Yuvaan Mars Rover
Design, manufacturing and control of a rover prototype for International Rover Challenge. See page for details.

Wheeled Biped
Dynamic modelling, control and simulation of wheeled bipedal robot. See page for details.
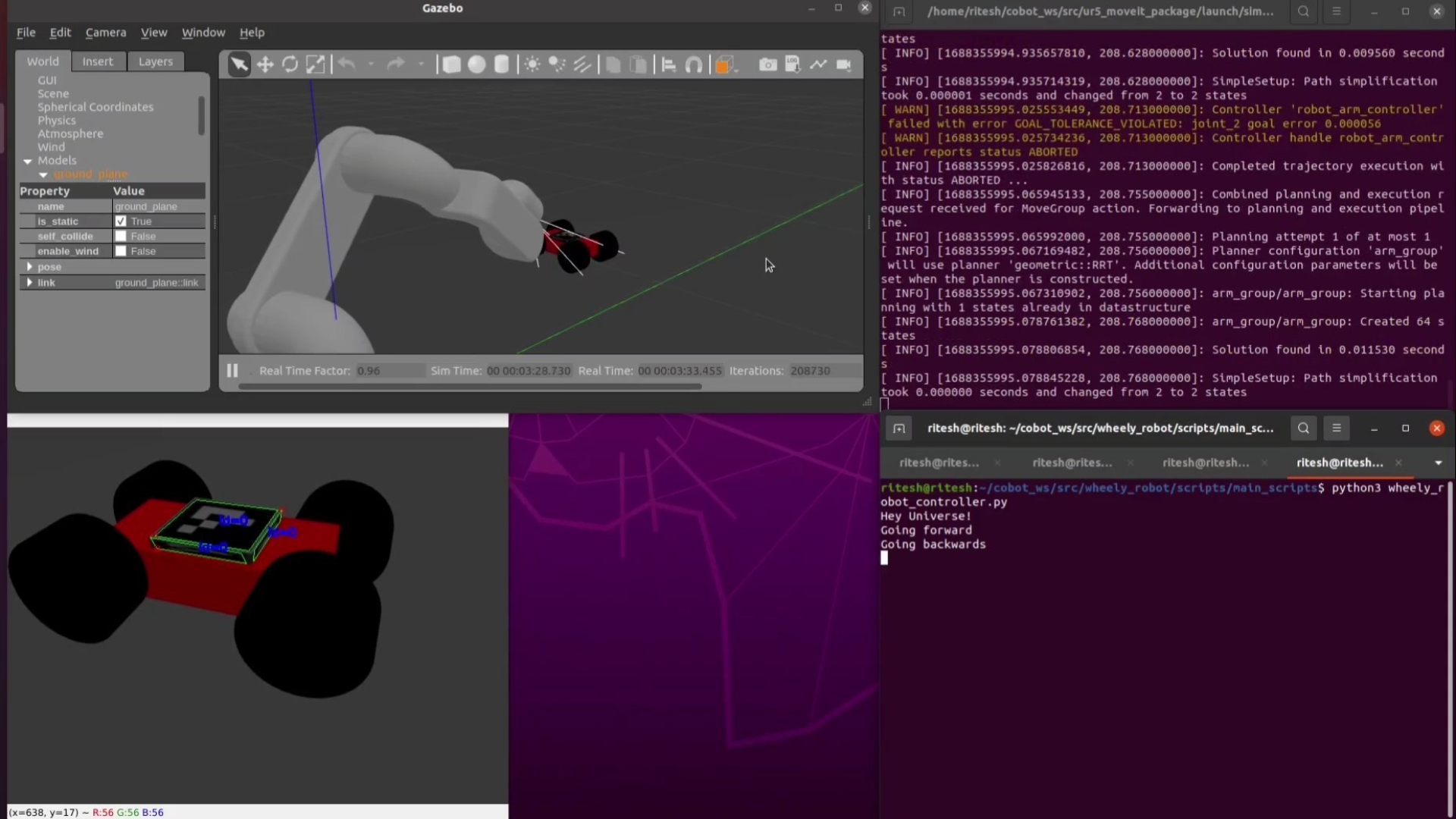
Object follower
Aruco Marker tracking and following implemented on UR5 Robot Arm. See page for details.
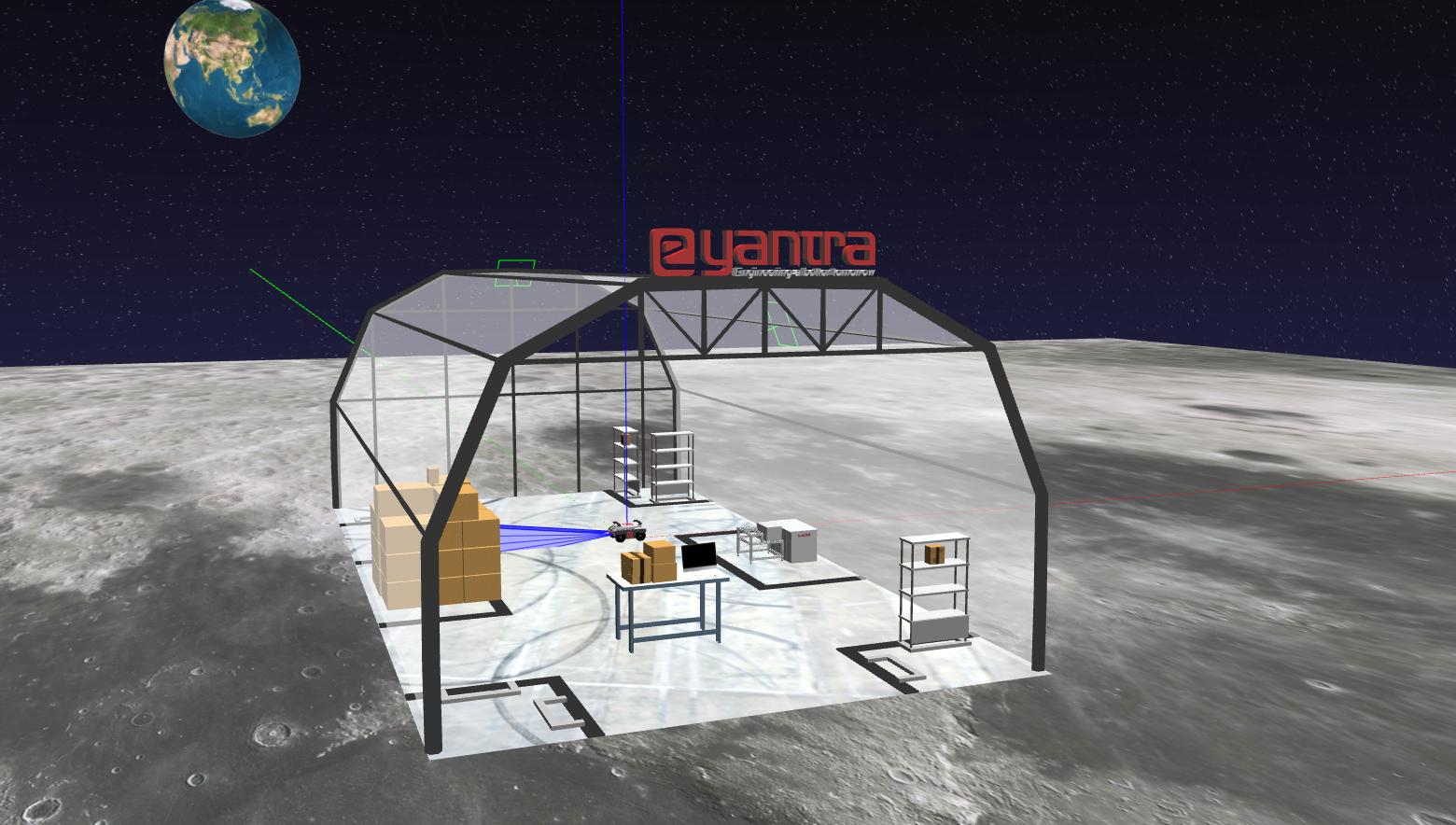
Cosmo Logistics Bot
A robotic arm and mobile robot collaborate to sort and prepare packages to be transported. See page for details.
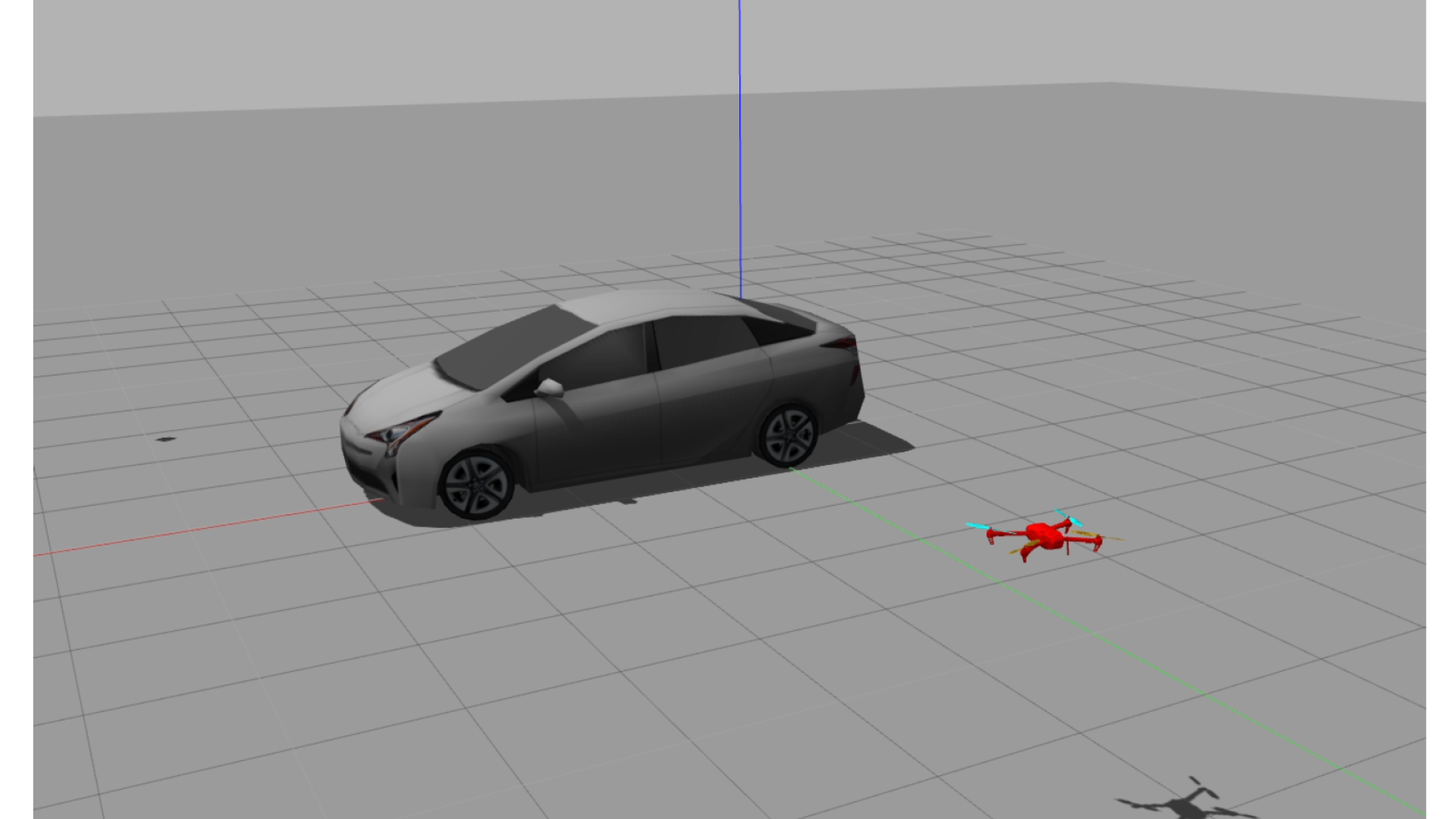
UAV Guided UGV
Guiding UGV using a UAV autonomously on roads in mountainous regions. See page for details.
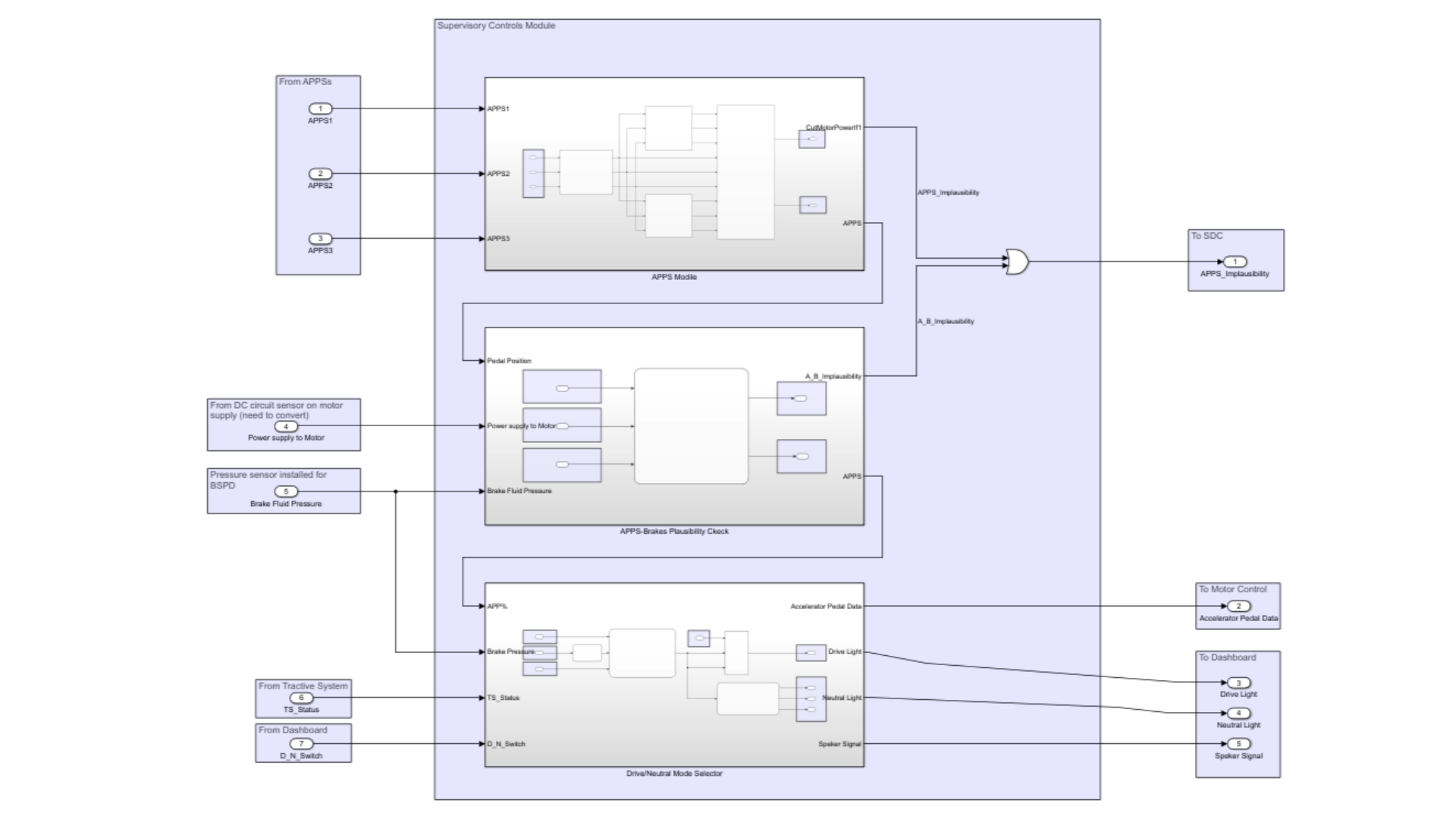
Supervisory Control Systems
Modelling and Implementation of Supervisory Control Systems for EV Powertrain. See page for details.
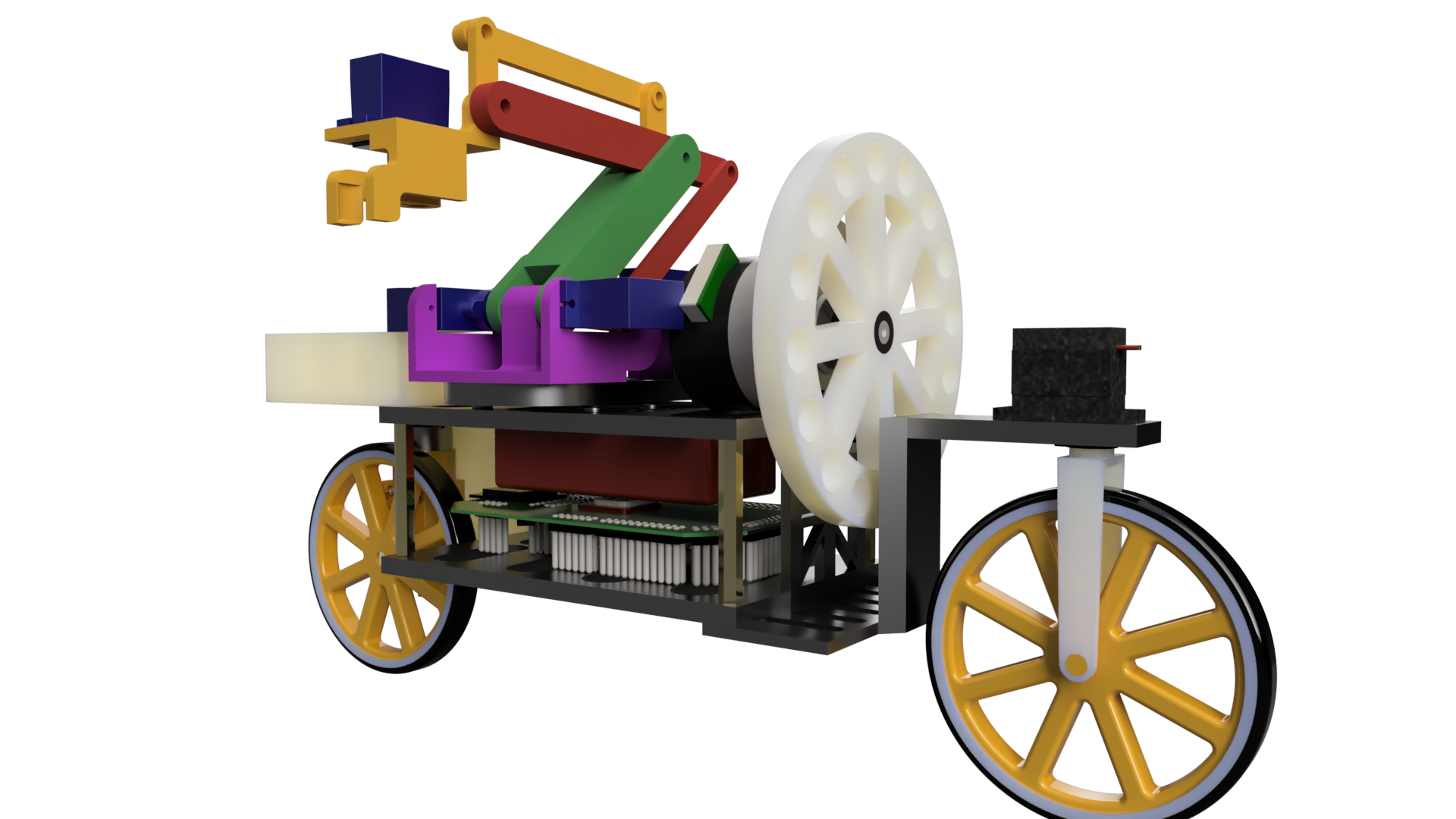
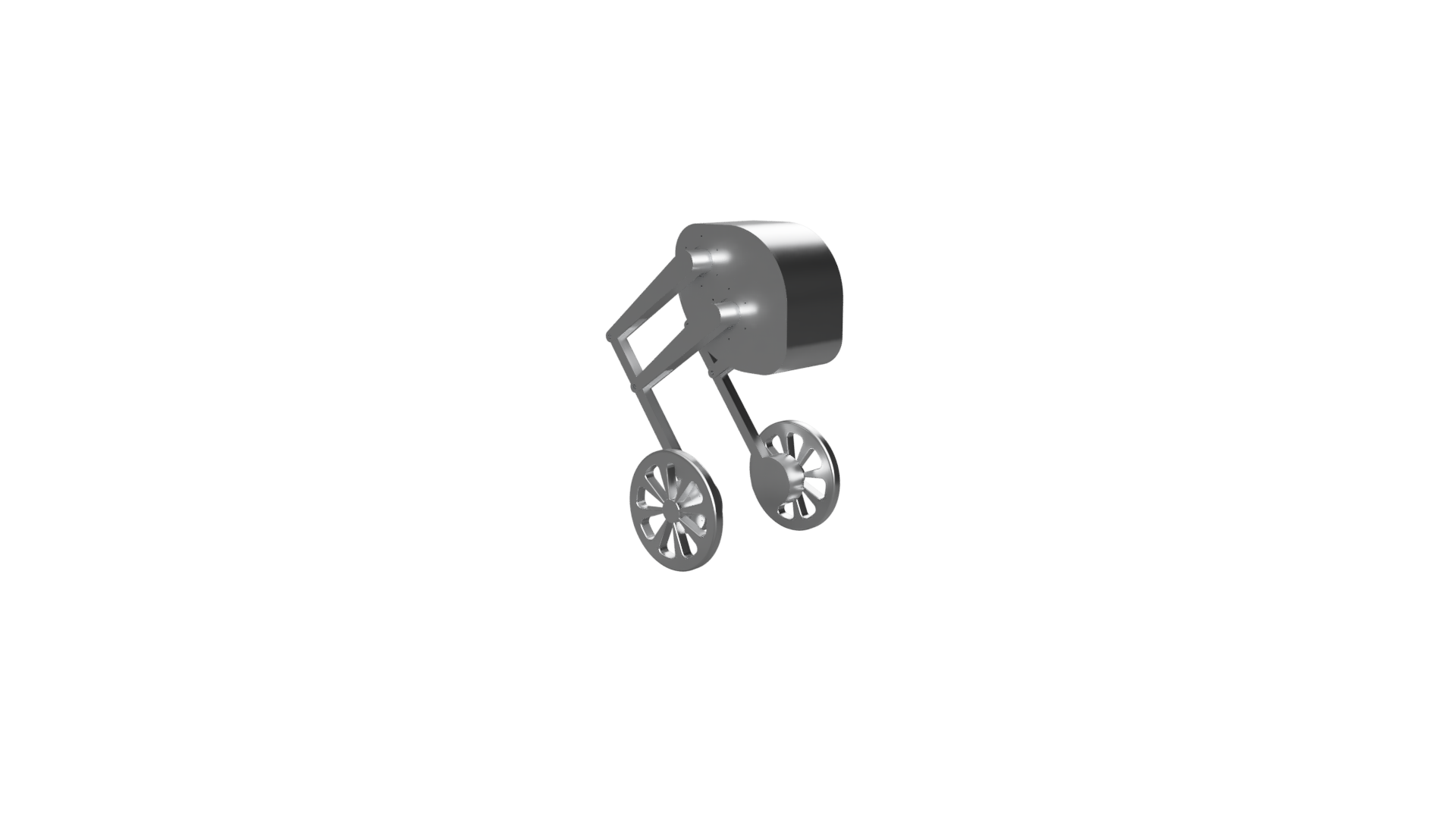
Delivery Bike
Design and control of flywheel-based self-balancing delivery. See page for details.